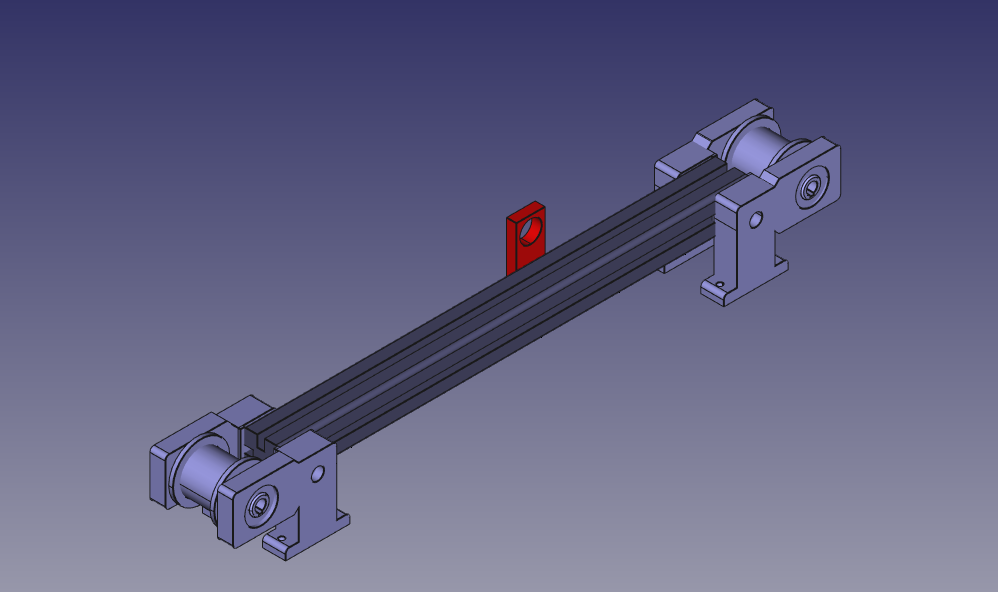
Este proyecto consiste en realizar una cinta transportadora didactica, para que los alumnos puedan realizar prácticas, simulando un entorno mas reál.
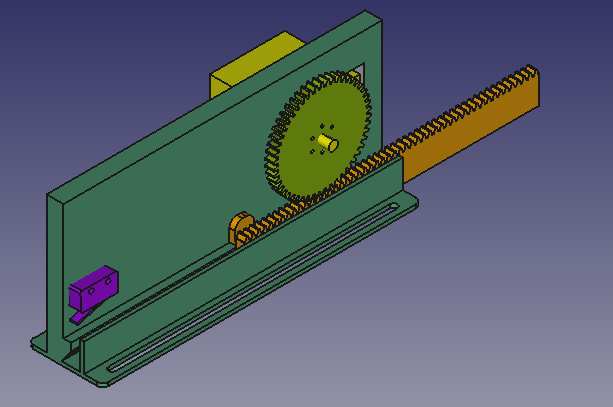
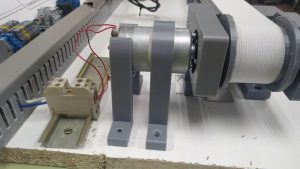
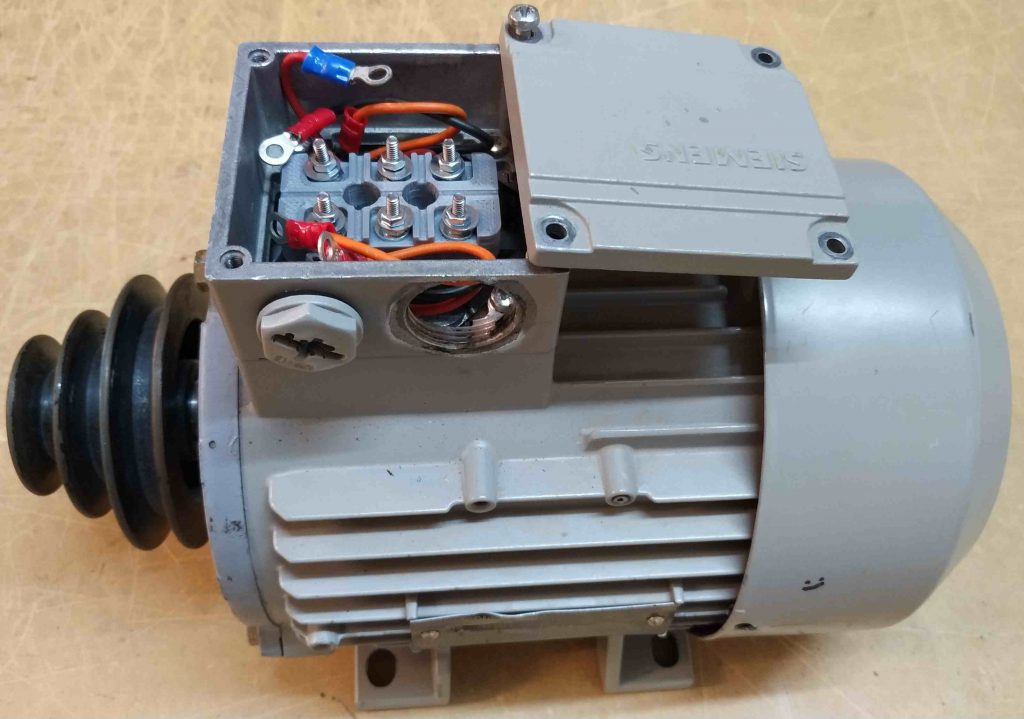
La cinta funciona con un motor trifásico y un variador de frecuencia, funcionado el motor con una frecuencia máxima de alimentación de 20Hz. Se realizará un segundo proyecto donde la unión de la cinta al motor se realice con una reductora, para que el motor pueda funcionar a la frecuencia 50Hz y la velocidad de la cinta no sea escesiva.
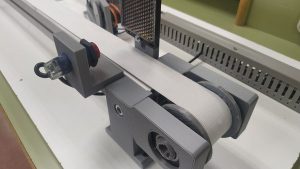
A la cinta se pueden acoplar distintos sensores (inductivos, capacitivos, fotocelulas…) para realizar distintas automatizaciones, también permite el funcionaciomiento en ambos sentidos.
Materiales
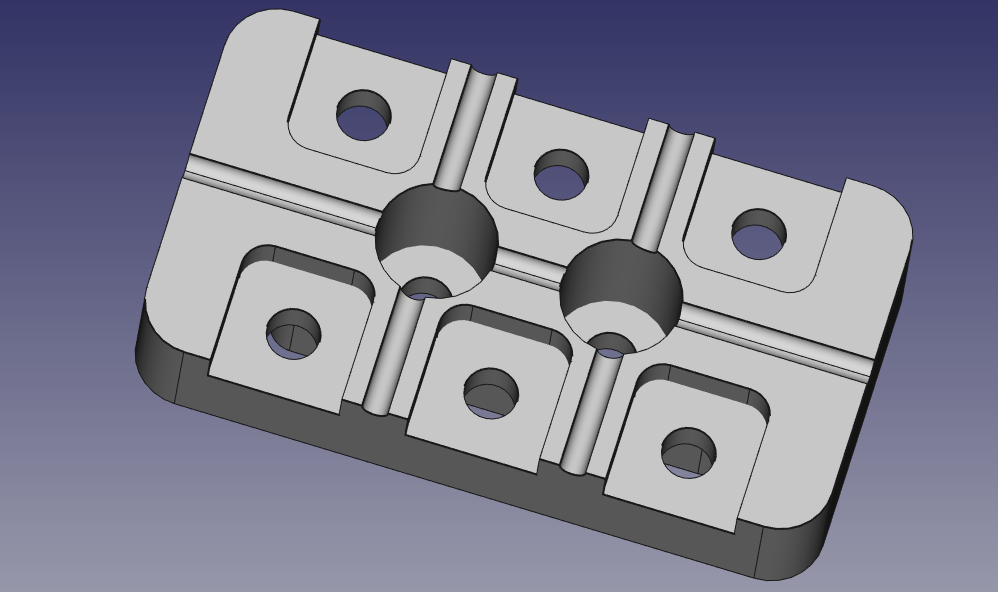
Perfil simétrico 40mm (longitud a gusto del usuario) (22€/m)
8 Tuercas M8 redonda con pestaña ranura de 8mm (1,20 €) ver
4 tornillos allen cabeza cilindrica M8x16 cincado (0,22 €) ver
4 tornillos allen cabeza cilindrica M8x20 cincado (0,22 €) ver
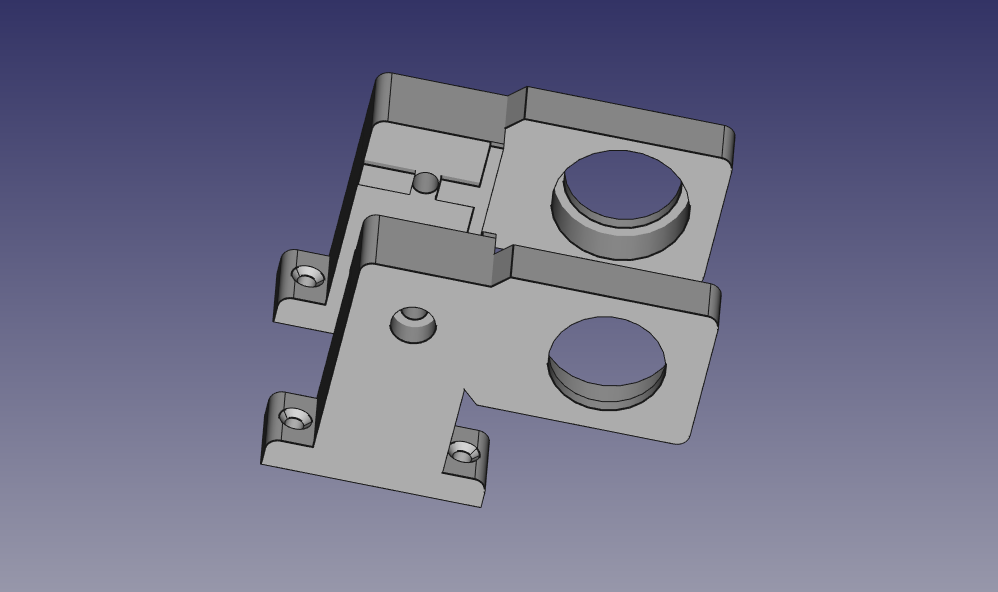
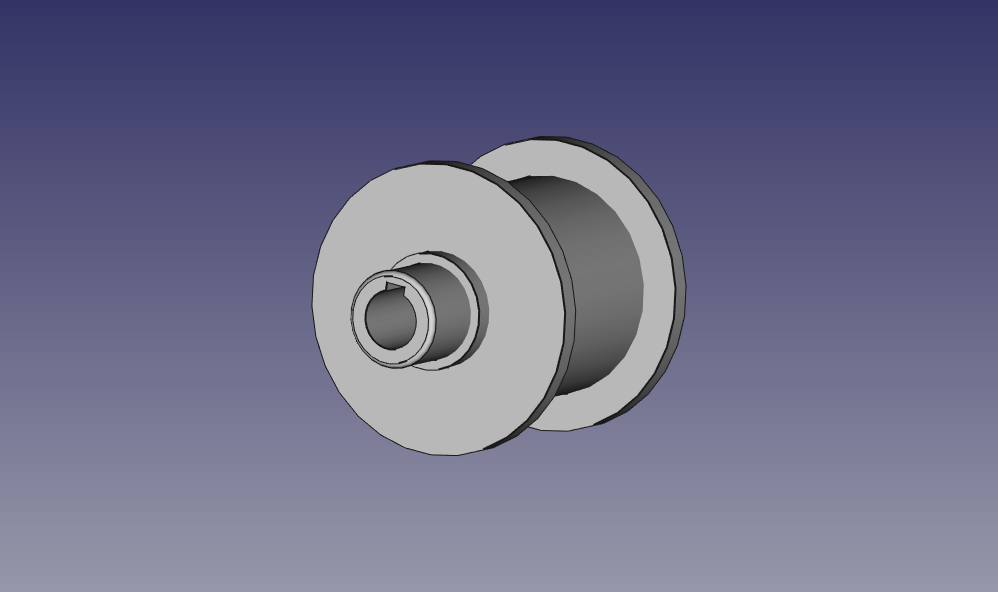
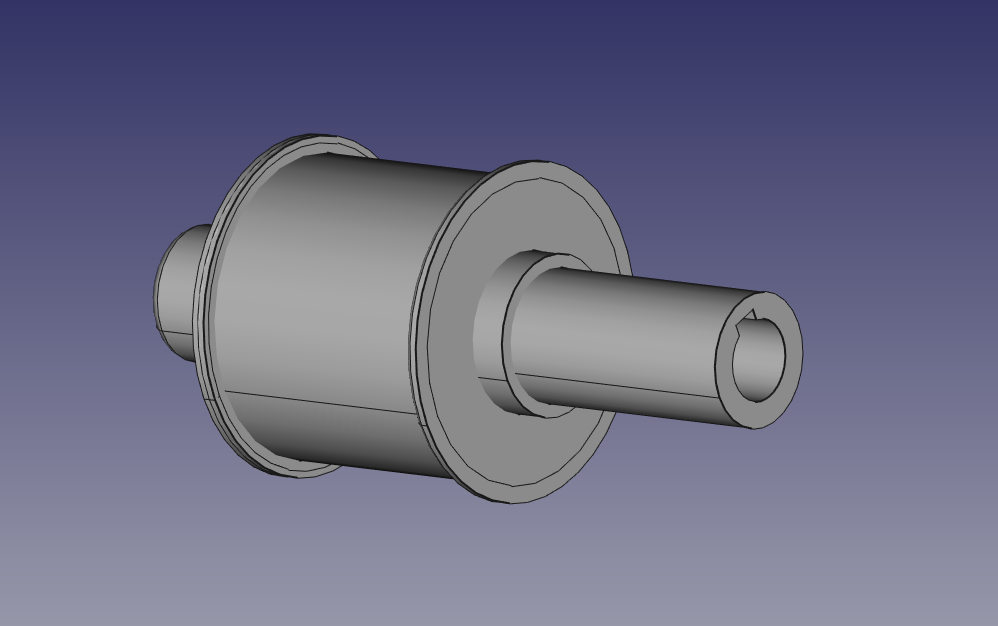
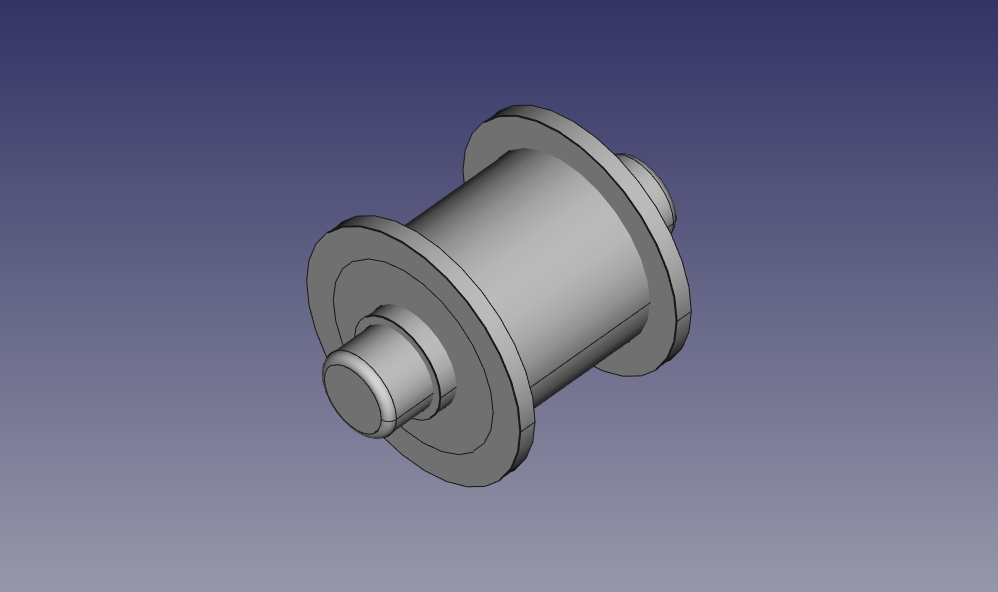
4 Rodamientos 6004 ISB 20x42x12mm (1,57 €) ver
4 Tornillo nivelador para pata metálica M8mm base de goma (4,50 €) ver
4 Tuercas exagonales M8 ver
1 motor siemens 1la7063-4ab10 (100€)
1 Variador de frecuencia Siemens SINAMICS V20 (170€)